
CORE TECHNOLOGY

 環(huán)境感知
環(huán)境感知
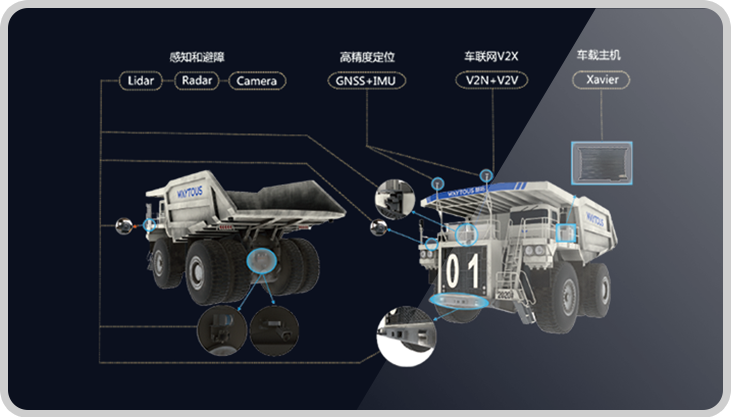
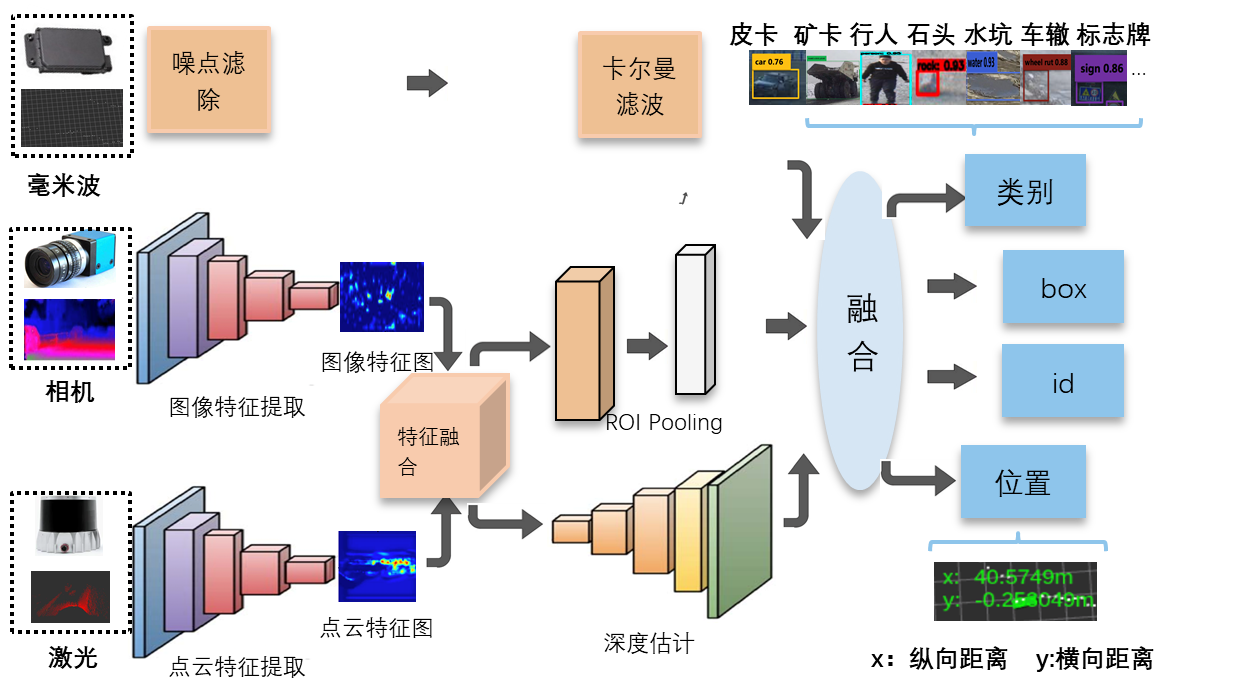
通過激光雷達(dá),、毫米波,、相機(jī)多傳感器深度融合網(wǎng)絡(luò)技術(shù),感知系統(tǒng)可確保在礦區(qū)粉塵,、雨雪霧,、劇烈震動(dòng)和極端低溫等惡劣工況的使用需求,實(shí)現(xiàn)車輛顛簸行駛過程中的高魯棒性多目標(biāo)的檢測(cè)和跟蹤
 決策規(guī)劃
決策規(guī)劃
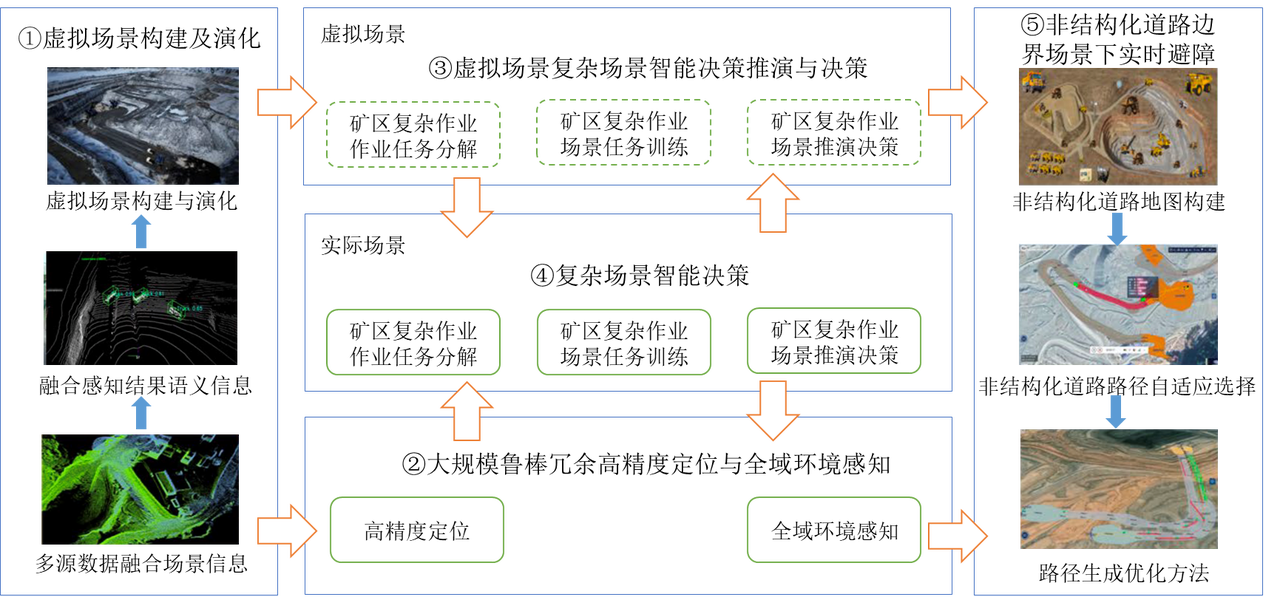
無人駕駛卡車具備復(fù)雜場(chǎng)景智能決策與自主路徑規(guī)劃能力,,引導(dǎo)車輛安全完全作業(yè)任務(wù),,可適用于實(shí)際生產(chǎn)中的各種極端裝載、卸載道路條件,,確保在生產(chǎn)過程中的高效和安全
 安全檢測(cè)
安全檢測(cè)
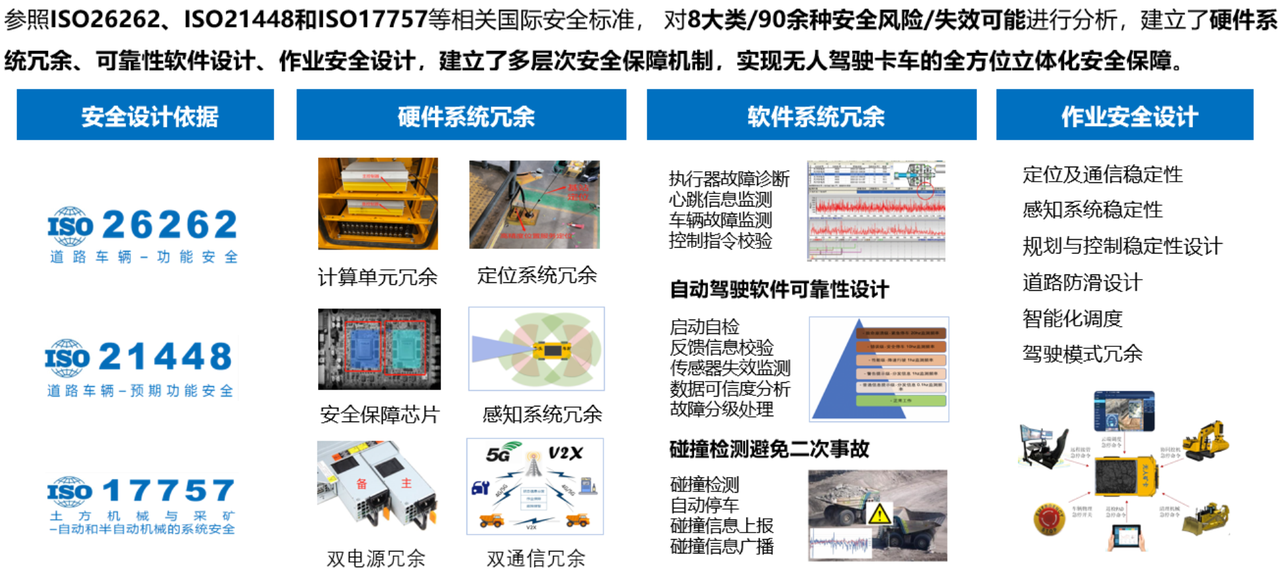
參照ISO26262,、ISO21448和ISO17757等相關(guān)國(guó)際安全標(biāo)準(zhǔn),,建立了硬件系統(tǒng)冗余、可靠性軟件設(shè)計(jì),、作業(yè)安全設(shè)計(jì),,建立了多層次安全保障機(jī)制,實(shí)現(xiàn)無人駕駛卡車的全方位立體化安全保障
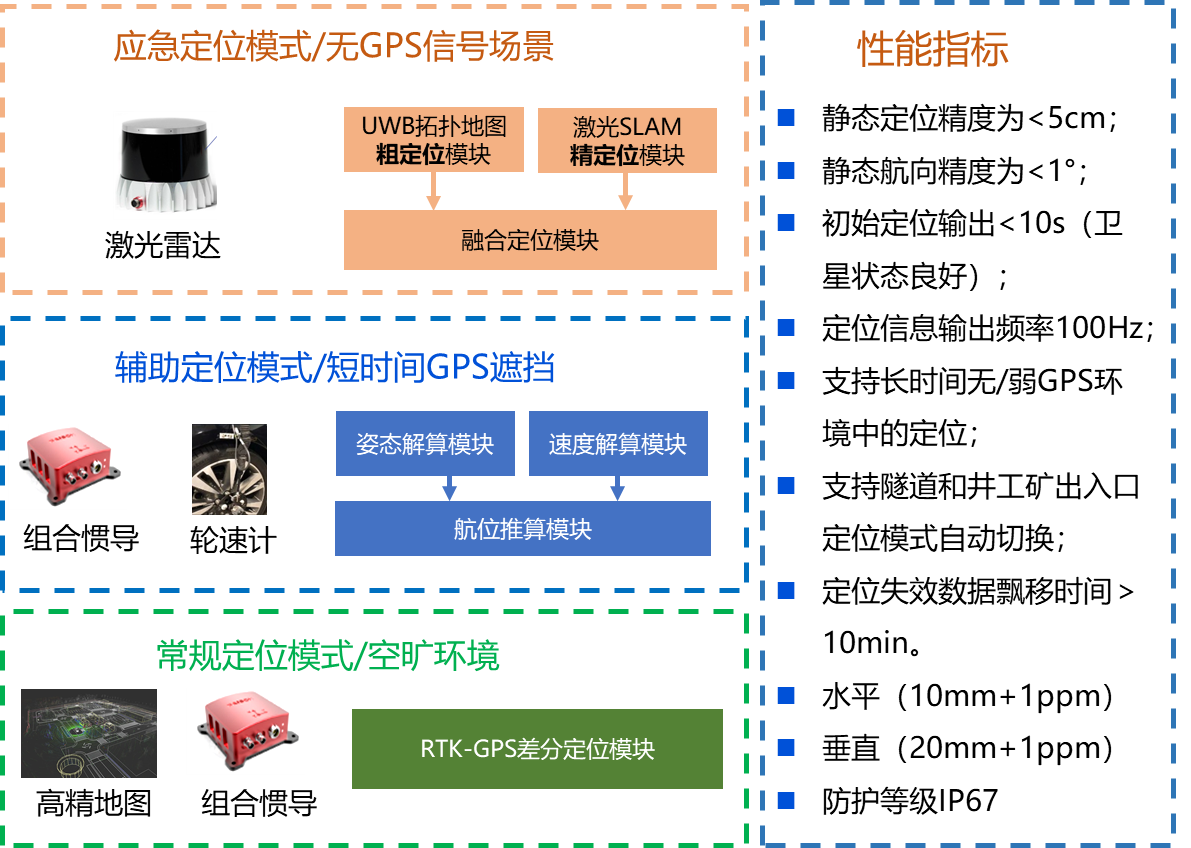 組合定位
組合定位
多傳感器融合定位方案,,可同時(shí)實(shí)現(xiàn)GNSS信號(hào)較強(qiáng)和信號(hào)較弱環(huán)境下的定位和定姿態(tài)功能,,解決礦區(qū) GNSS系統(tǒng)信號(hào)的不穩(wěn)定性(響應(yīng)度低、易被遮擋,、深坑長(zhǎng)時(shí)間信號(hào)丟失等情況)的問題
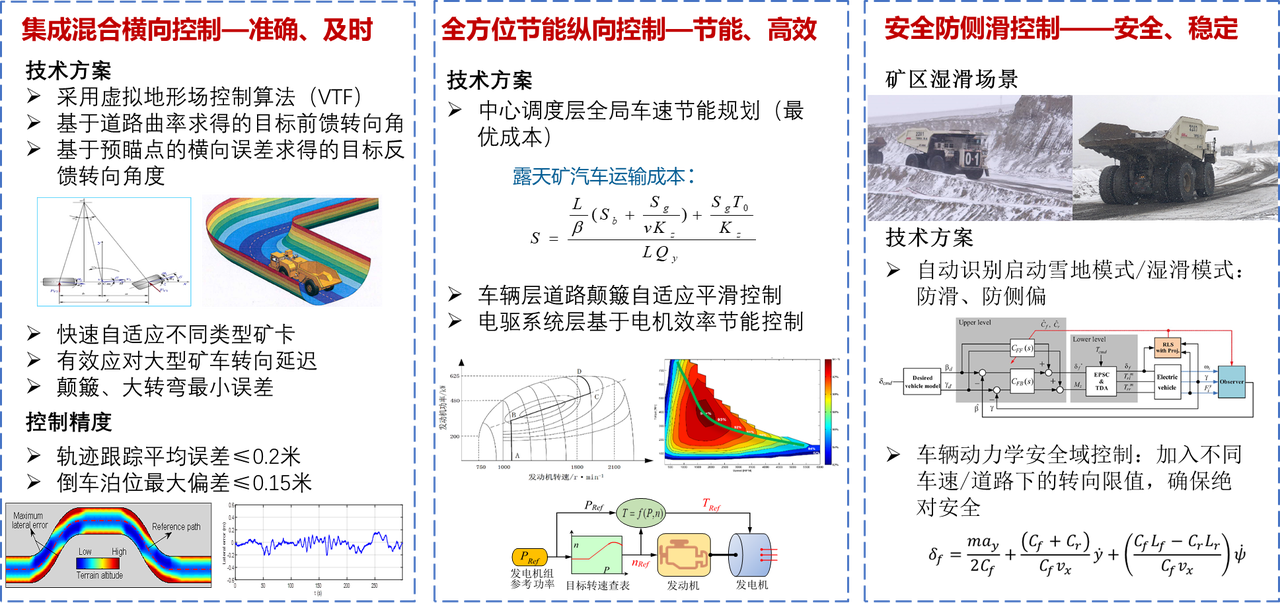 礦卡控制
礦卡控制
獨(dú)創(chuàng)的無人駕駛礦卡軌跡跟蹤控制算法解決了不同礦卡自身響應(yīng)差異對(duì)控制精度的影響,,達(dá)到業(yè)內(nèi)最高的運(yùn)行速度和最小軌跡跟蹤誤差,具備全方位節(jié)能控制和安全防滑控制能力
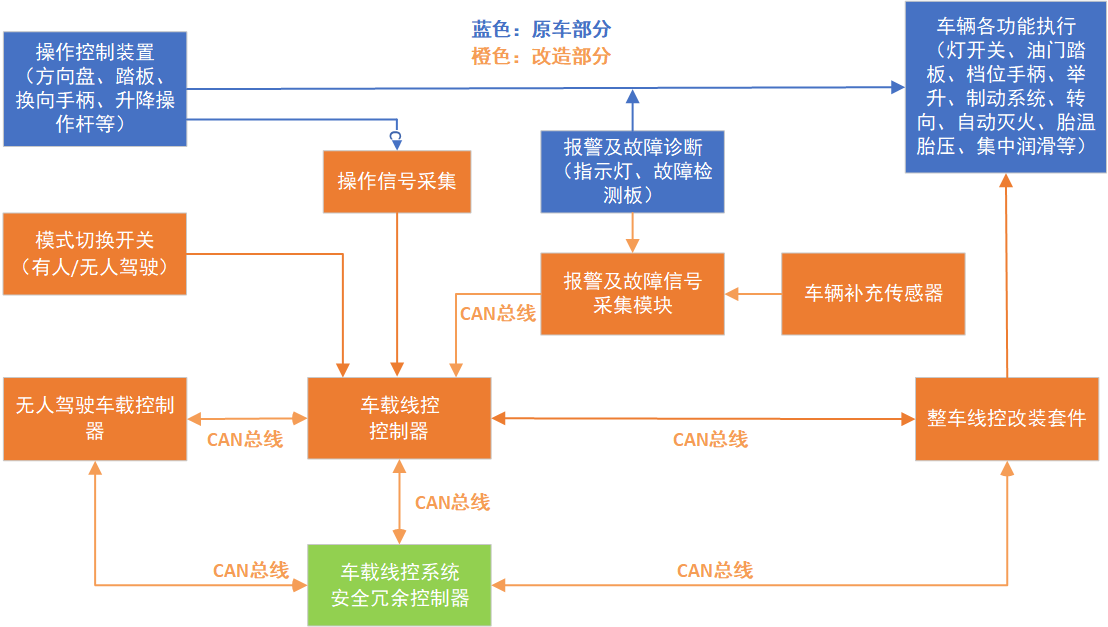 線控系統(tǒng)
線控系統(tǒng)
線控化改造經(jīng)驗(yàn)涵蓋了電動(dòng)輪礦卡,、機(jī)械輪礦卡,、鉸卡、電動(dòng)輪寬體車,、機(jī)械輪寬體車等,涉及到的卡車品牌包括徐工,、北重,、航天、小松,、Volvo,、 Terex、三一,、宇通,、臨工、濰柴,、同力等,,共計(jì)超過16個(gè)車型,能夠確保各類型卡車無人駕駛改造的需求

地圖自動(dòng)采集與更新

防車轍道路均衡碾壓

非標(biāo)準(zhǔn)擋墻精準(zhǔn)???/p>

顛簸道路檢測(cè)與降速

轉(zhuǎn)向自適應(yīng)精準(zhǔn)控制

系統(tǒng)可靠性與安全性
 微信公眾號(hào)
微信公眾號(hào)
 京公網(wǎng)安備 11010802033712號(hào)
京公網(wǎng)安備 11010802033712號(hào)