
CORE TECHNOLOGY



 高智慧礦山操作系統(tǒng)
高智慧礦山操作系統(tǒng)
適配全機(jī)型,、多礦種,、全場景
 高質(zhì)量標(biāo)準(zhǔn)交付流程
高質(zhì)量標(biāo)準(zhǔn)交付流程
軟件硬件化、服務(wù)產(chǎn)品化,、產(chǎn)品系列化,、系統(tǒng)平臺化
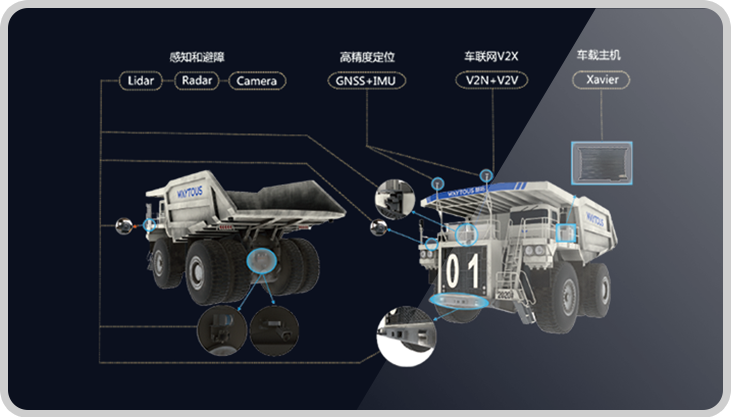
 高性能無人礦山系統(tǒng)
高性能無人礦山系統(tǒng)
安全、效率,、無人,、混編、節(jié)能


Autonomous Fleet Management System
 高精度地圖
高精度地圖
 全局路徑規(guī)劃
全局路徑規(guī)劃
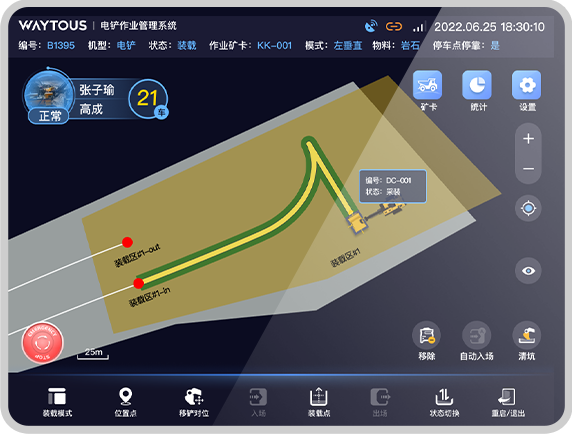
 智能化調(diào)度
智能化調(diào)度
 對接有人卡調(diào)
對接有人卡調(diào)
 車隊(duì)交通管理
車隊(duì)交通管理
 數(shù)據(jù)統(tǒng)計(jì)與分析
數(shù)據(jù)統(tǒng)計(jì)與分析

 地圖自動采集與更新
地圖自動采集與更新
 障礙物繞行/騎行/上報(bào)
障礙物繞行/騎行/上報(bào)
 顛簸道路檢測與自動降速
顛簸道路檢測與自動降速
 防車轍均衡碾壓
防車轍均衡碾壓
 非標(biāo)準(zhǔn)擋墻精準(zhǔn)檢測與自適應(yīng)???/span>
非標(biāo)準(zhǔn)擋墻精準(zhǔn)檢測與自適應(yīng)???/span>

 實(shí)時(shí)通信
實(shí)時(shí)通信
 路徑規(guī)劃
路徑規(guī)劃
 協(xié)同作業(yè)
協(xié)同作業(yè)
 故障上報(bào)
故障上報(bào)


Avatar Driver System
 車輛監(jiān)控
車輛監(jiān)控
 應(yīng)急接管
應(yīng)急接管
 遠(yuǎn)程作業(yè)
遠(yuǎn)程作業(yè)
 一控多車
一控多車
 多級安全策略
多級安全策略

Intelligent Roadside Cooperative System
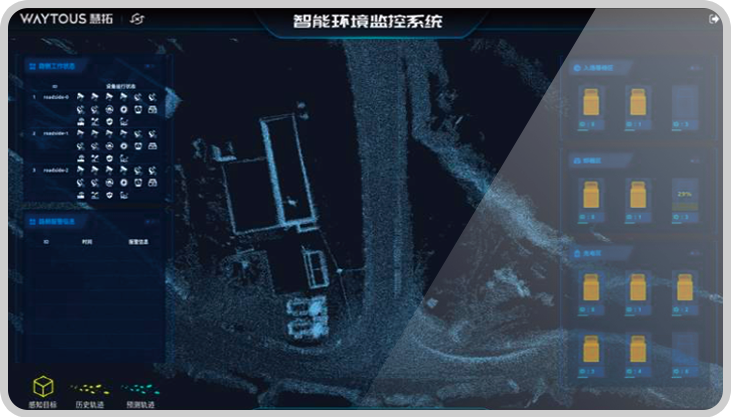
 車路協(xié)同感知
車路協(xié)同感知
 信息服務(wù)
信息服務(wù)
 道路預(yù)警
道路預(yù)警
 路徑規(guī)劃與決策
路徑規(guī)劃與決策
 交通管控與調(diào)度
交通管控與調(diào)度


Parallel Mine Simulation System
 自動駕駛算法功能驗(yàn)證
自動駕駛算法功能驗(yàn)證
 云端調(diào)度與管理功能驗(yàn)證
云端調(diào)度與管理功能驗(yàn)證
 深度虛實(shí)混合極端場景驗(yàn)證
深度虛實(shí)混合極端場景驗(yàn)證
 無人系統(tǒng)軟硬件穩(wěn)定性測試
無人系統(tǒng)軟硬件穩(wěn)定性測試
 自動駕駛算法訓(xùn)練升級
自動駕駛算法訓(xùn)練升級
 微信公眾號
微信公眾號
 京公網(wǎng)安備 11010802033712號
京公網(wǎng)安備 11010802033712號